Autosub tracks - 2009
Description
The Autosub3 was deployed from the research icebreaker Nathaniel B Palmer in January 2009. With respective range and depth ratings of 400 km and 1600 m, the vehicle operated between launch and recovery without external guidance, collecting data along a pre-programmed track while navigating by dead reckoning relative to the seabed or the ice shelf base.
The AUV was equipped with: a Seabird 911 conductivitytemperature-depth (CTD) system with integrated dissolved oxygen sensor and WetLabs transmissometer; a Kongsberg EM2000 multi-beam echosounder, pre-configured to image either ice shelf base or seabed; and both upward- and downward-looking RDI Teledyne acoustic Doppler current profilers (ADCPs). It gathered data along 877 km of track during 167 hours of operations, of which nearly 60% was beneath the PIG ice shelf.
Autosub 3 tracks beneath Pine Island Glacier during 2009 field season. Data provided by Adrian Jenkins (BAS).
References
1. Jenkins, A. and 6 others. 2010. Observations beneath Pine Island Glacier in West Antarctica and implications for its retreat. Nature Geosci., 3(7), 468–472. Available here
2. iSTAR - working in an extreme environment
Field photo
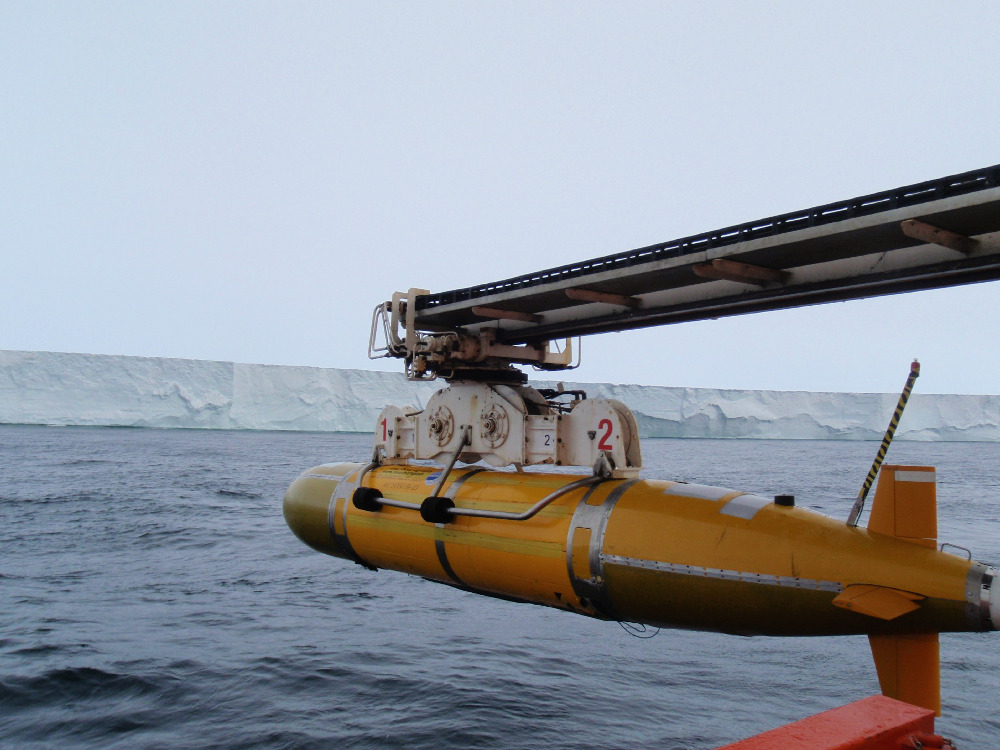
AUTOSUB 3 autonomous underwater vehicle being deployed for observational missions beneath the floating tongue of Pine Island Glacier, Admunsen Sea. BAS Image collection (2009/2010) , Pierre Dutrieux
Figures
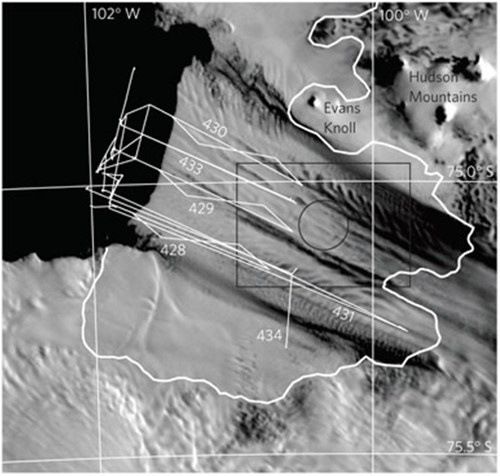
Figure 1: Modis image of PIG obtained on 28 December 2008 showing tracks followed by Autosub3 (white, labelled with mission number) and the grounding line (bold, white) as mapped in 1996. Jenkins et al., 2010